Stanford Seminar - Robots in Dynamic Tasks: Learning, Risk, and Safety
Skills:
Agent Foundations90%Tool Use & Function Calling80%Multi-Agent Systems70%Autonomous Workflows60%
March 10, 2023
Joel Burdick of Caltech
Autonomous robots are increasing applied to tasks that involve complex maneuvers and dynamic environments that are difficult to model a priori. Various types of learning methods have been proposed to fill this modeling gap. To motivate the need for learning complex fluid-structure interactions, we first review the SQUID (a ballistically launched and self-stabilizing drone) and PARSEC (an aerial manipulator that can deliver self-anchoring sensor network modules) systems. Next we show how to learn basic fluid-structure interactions using Koopman spectral techniques, and incorporate the learned model into a real-time nonlinear model predictive control framework. The performance of this approach is demonstrated on small drones that operate very close to the ground, where the ground effect normally destabilizes flight. Operational risk abounds in complex robotic tasks. This risk arises both from the uncertain environment, and from incompletely learned models. After reviewing the basics of coherent risk measures, we will show how simple risk aware terrain analysis improved the performance of our legged and wheeled robots in the DARPA Subterranean challenge. Then we will introduce an on-line method to learn the dynamics of an apriori unknown dynamical obstacle, and robustly avoid the obstacle using a novel risk-based, distributionally robust, chance constraints derived from the evolving learned model. We then introduce the concept of risk surfaces to enable fast on-line learning of a priori unknown dynamical disturbances, and show how this approach can adapt a drone to wind disturbances with only 45 seconds of on-line data gathering.
0:00 Introduction
2:47 SQUID I: Key Design Elements
4:00 SQUID II: Vision-based Autonomous Stabilization
6:22 Planetary Exploration Applications
8:01 PARSEC: Payload Anchoring Robotic System for the Exploration of Cliffs Task Motivation and Description
8:32 PARSEC: Aerial Manipulator
9:23 Deployment Int
Watch on YouTube ↗
(saves to browser)
Sign in to unlock AI tutor explanation · ⚡30
Playlist
Uploads from Stanford Online · Stanford Online · 0 of 60
← Previous
Next →
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 10
10
 11
11
 12
12
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
 30
30
 31
31
 32
32
 33
33
 34
34
 35
35
 36
36
 37
37
 38
38
 39
39
 40
40
 41
41
 42
42
 43
43
 44
44
 45
45
 46
46
 47
47
 48
48
 49
49
 50
50
 51
51
 52
52
 53
53
 54
54
 55
55
 56
56
 57
57
 58
58
 59
59
 60
60

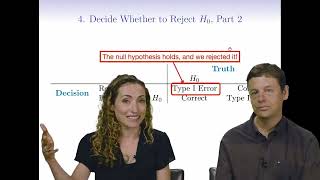
Statistical Learning: 13.2 Introduction to Multiple Testing and Family Wise Error Rate
Stanford Online
Statistical Learning: 13.1 Introduction to Hypothesis Testing II
Stanford Online
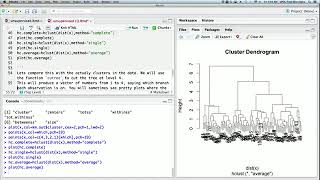
Statistical Learning: 12.R.3 Hierarchical Clustering
Stanford Online
Statistical Learning: 12.R.2 K means Clustering
Stanford Online
Statistical Learning: 12.R.1 Principal Components
Stanford Online
Statistical Learning: 13.R.1 Bonferroni and Holm II
Stanford Online
Statistical Learning: 12.6 Breast Cancer Example
Stanford Online
Statistical Learning: 12.5 Matrix Completion
Stanford Online
Statistical Learning: 12.4 Hierarchical Clustering
Stanford Online
Statistical Learning: 12.3 k means Clustering
Stanford Online
Statistical Learning: 13.1 Introduction to Hypothesis Testing
Stanford Online
Stanford Seminar - Introduction to Web3
Stanford Online
Stanford Seminar - Designing Equitable Online Experiences
Stanford Online
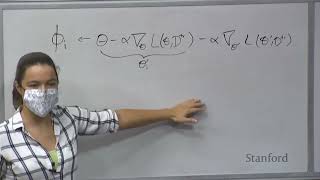
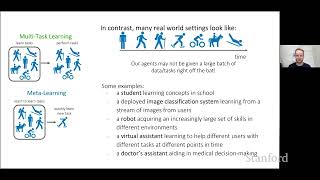
Stanford CS330: Deep Multi-Task & Meta Learning I 2021 I Lecture 1
Stanford Online
Stanford Seminar - Perceiving, Understanding, and Interacting through Touch
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 2
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 3
Stanford Online
Stanford CS330: Deep Multi-Task & Meta Learning I 2021 I Lecture 4
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 5
Stanford Online
Stanford Seminar - Evolution of a Web3 Company
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 6
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 7
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 8
Stanford Online
Stanford Seminar - Designing Human-Centered AI Systems for Human-AI Collaboration
Stanford Online
The Sh*tFixers: Bob Sutton Interviews David Kelley, Design Thinking Superstar
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 9
Stanford Online
Women Rise: Sheri Sheppard
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 10
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 11
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 12
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 13
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 14
Stanford Online
Stanford Webinar - Cloud Computing: What’s on the Horizon with Dr. Timothy Chou
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 15
Stanford Online
Stanford Seminar - Multi-Sensory Neural Objects: Modeling, Inference, and Applications in Robotics
Stanford Online
Stanford CS330: Deep Multi-task & Meta Learning I 2021 I Lecture 16
Stanford Online
Stanford Seminar - Toward Better Human-AI Group Decisions
Stanford Online
Stanford CS330: Deep Multi-Task & Meta Learning I 2021 I Lecture 17
Stanford Online
Stanford CS330: Deep Multi-Task & Meta Learning I 2021 I Lecture 18
Stanford Online
Stanford Webinar - Web3 Considered: Possible Futures for Decentralization and Digital Ownership
Stanford Online
Stanford Seminar - Ethics Governance-in-the-Making: Bridging Ethics Work & Governance Menlo Report
Stanford Online
Stanford Seminar - Towards Generalizable Autonomy: Duality of Discovery & Bias
Stanford Online
Stanford Seminar - ML Explainability Part 1 I Overview and Motivation for Explainability
Stanford Online
Stanford Seminar - ML Explainability Part 2 I Inherently Interpretable Models
Stanford Online
Stanford Seminar - ML Explainability Part 3 I Post hoc Explanation Methods
Stanford Online
Kratika Gupta talks about Stanford's Product Management Program
Stanford Online
Stanford Seminar - Making Teamwork an Objective Discipline - Sid Sijbrandij CEO & Chairman of GitLab
Stanford Online
Stanford Seminar - ML Explainability Part 4 I Evaluating Model Interpretations/Explanations
Stanford Online
Stanford Seminar - Adaptable Robotic Manipulation Using Tactile Sensors
Stanford Online
Stanford Seminar - ML Explainability Part 5 I Future of Model Understanding
Stanford Online
Meet Joe Lapin, Innovation and Entrepreneurship Program Completer
Stanford Online
Stanford Seminar: Social Media Scrutiny of Frontline Professionals & Implications for Accountability
Stanford Online
Stanford Seminar - Alphy and Alphy Reflect: creating a reflective mirror to advance women
Stanford Online
Stanford Webinar - The Digital Future of Health
Stanford Online
Stanford CS229M - Lecture 1: Overview, supervised learning, empirical risk minimization
Stanford Online
Stanford CS229M - Lecture 2: Asymptotic analysis, uniform convergence, Hoeffding inequality
Stanford Online
Stanford CS229M - Lecture 3: Finite hypothesis class, discretizing infinite hypothesis space
Stanford Online
Stanford Seminar - Decentralized Finance (DeFi)
Stanford Online
Stanford CS229M - Lecture 4: Advanced concentration inequalities
Stanford Online
Stanford Seminar - Bridging AI & HCI: Incorporating Human Values into the Development of AI Tech
Stanford Online
More on: Agent Foundations
View skill →




Related AI Lessons
Chapters (7)
Introduction
2:47
SQUID I: Key Design Elements
4:00
SQUID II: Vision-based Autonomous Stabilization
6:22
Planetary Exploration Applications
8:01
PARSEC: Payload Anchoring Robotic System for the Exploration of Cliffs Task Moti
8:32
PARSEC: Aerial Manipulator
9:23
Deployment Int
🎓
Tutor Explanation
