NVIDIA Alpamayo-R1: Real-Time Reasoning for Level 4 Autonomy
Skills:
LLM Foundations90%LLM Engineering80%AI Alignment Basics70%AI Ethics & Policy60%AI Safety Engineering50%
Key Takeaways
NVIDIA Alpamayo-R1 is a Vision-Language-Action model that brings human-like reasoning to autonomous driving, achieving a 12% improvement in planning accuracy and a 35% reduction in close encounter rate in closed loop simulations. It uses a novel chain of causation data set, reinforcement learning, and a specialized physical AI vision language brain called Cosmos Reason.
Full Transcript
Welcome to the deep dive, the place where we take the latest, most complex information and turn it into knowledge you can [music] use fast. Today we are strapping into the driver's seat of level 4 autonomy. >> We are and we're focusing on a uh a major innovation from Nvidia, one that promises to solve what is probably the most frightening problem for self-driving cars. >> The moment they encounter something completely unexpected. >> Exactly. This is project Alpamo R1 or AR1 for short. And if you've been tracking the trajectory of autonomous driving, you know the biggest hurdle isn't, you know, handling the routine stuff. >> Oh, not at all. A simple highway merge, stopping at a clear red light, the whole industry can pretty much solve those. The persistent critical failure point is what they call the longtail problem. >> The longtail problem. That phrase really does sum up every nightmare scenario, doesn't it? >> It does. I mean, we're talking about the rare safety critical events that are almost impossible to supervise with enough training data. >> So, like a construction zone that just appears mid route, it's not on any map, >> right? With flaggers directing traffic in completely non-standard ways and then maybe uh a sudden torrential downpour cuts your visibility. >> And just to make it worse, an unpredictable human driver cuts you off to avoid a car door that just opened. >> That's it. That combinatorial complexity just breaks traditional models. And these current end toend or E2E models, despite their massive scale, all the data they process, they're often brittle in those moments. >> They are because they lack something fundamental, >> genuine causal understanding. They've learned to mimic millions of safe human maneuvers, but they haven't learned why those maneuvers are safe or necessary. >> They drive, but they don't really think. >> Exactly. And that is the core limitation. AR1 is trying to well obliterate. Alpamo R1 is Nvidia's direct attempt to bridge that gulf between raw perception and sophisticated decision-making. >> So, it's a vision language action model, a VLA model. >> Yes. And it's designed to explicitly integrate that highle causal reasoning, that human-like deliberation with the very precise low-level trajectory control you need for robust level four autonomy. >> The big audacious claim here is that AR1 doesn't just react, it thinks first. It generates a structured internal deliberation which they call the chain of causation or coy trace. It explains in human readable terms why it's about to take an action before the command is even executed. >> Okay. So today we're going to unpack three massive intertwined innovations that make this possible. >> Right? First we have to understand the novel chain of causation data set. The coc data set they built from scratch. It's what trains this structured verifiable reasoning. And second, we'll dive into the modular architecture. This thing combines a specialized physical AI vision language brain called Cosmos Reason with an incredibly efficient trajectory decoder, >> a flow matching trajectory decoder, which we'll get into. And third, the secret sauce that enforces trustworthiness. This sophisticated multi-stage training that uses reinforcement learning, RL, to explicitly enforce consistency, >> consistency between what the model says it's doing and what it actually does. >> Exactly. Between the text and the action. >> And for the immediate payoff, the results here are pretty compelling. They seem to validate this reasoning first approach. >> They really do. They're showing up to a 12% improvement in planning accuracy, specifically on those challenging, hard to predict longtail scenarios. And even more critically in their closed loop simulations, a 35% reduction in the close encounter rate, >> which is a major leap in safety. And importantly, it's not slow. They confirmed an endto-end inference latency of just 99 milliseconds. >> A sub 100 millisecond response time. That means this isn't just a research paper. It's a deployable blueprint. If you're looking for how AI transitions from a pattern matching driver to a reasoning, trustworthy co-pilot, this is the deep dive for you. Let's unpack this. Okay, so let's ground ourselves a bit in the history of these systems. We started with what we'd call traditional modular architectures, >> right? Separate siloed components. You had one box for perception, another for prediction, another for planning, all sort of stitched together with handgineered rules. And then we saw this massive industry shift toward endtoend or E2E frameworks. What uh what really powered that transition? What problems did it solve? >> Well, the transition was really driven by the realization that managing those interfaces between the modules was incredibly difficult and just inefficient. >> Okay, so in a classic system, perception spits out what? A list of objects. >> Yeah, a list of bounding boxes and velocities for every car, every pedestrian. That list then feeds into the prediction module which tries to guess where everything is going. Finally, the planning module takes all that data and figures out where the ego vehicle your car should go. >> So if the perception module misjudges a pedestrian speed by just a tiny amount, >> that tiny error just cascades. It compounds dramatically, it can lead the prediction module to suggest a totally implausible path and then the planning module stuck with its rules has to choose the least bad outcome. >> You get this error propagation. The model is constantly fighting its own engineered connections. >> Exactly. E2e models which leverage these massive transformer-based architectures. They just bypass all of that. They map raw sensor inputs directly to vehicle motion. >> So you're eliminating that manual engineering complexity. The model learns the entire policy, the how and the why of driving all at once from these gargantuan data sets. >> Precisely. You get joint optimization. You get policy learning at scale. And you see these significant improvements in generalization for all the routine driving tasks. >> But and this is the big but we mentioned in the intro that generalization only goes so far. >> Right? Despite processing pabytes of data, current E2E models are ultimately fragile when they confront these longtail scenarios. >> This is the critical problem holding back true level four robustness. Let's get a little deeper into why just throwing more scale at the problem breaks down in those safety critical situations. What is this fragility of scale? >> The problem is really a combination of statistical scarcity and combinatorial complexity. I mean, by definition, a safety critical corner case-like, say, a flash flood obscuring the lane lines >> while a car is reversing unexpectedly out of a driveway >> and you're dealing with sensor glare from the sun at the same time. That specific combination just doesn't appear frequently enough in the training data to build any statistical confidence. So even if you see a million highway merges, you might only see a handful where the road is wet, visibility is low, and the car in front of you is tailgating. >> Exactly. The model can only match patterns it has seen. It can't synthesize a new response to a novel combination of threats. >> It lacks that genuine causal understanding. >> That's the key. It doesn't grasp the underlying physics or traffic laws or driver psychology that dictate why a certain maneuver is necessary. For example, it doesn't know why yielding to a pedestrian is mandatory. Only that its data set suggests slowing down when a human shape is nearby. >> It's brittle. It can't reason that truck is moving slowly because it's heavily loaded and on an incline. Therefore, I have to wait much longer before trying to pass it. >> It just relies on similarity to pass data. And that critical gap is what's blocking robust level four autonomy. >> So if the solution isn't just more data, where do we look? And this is where the big advance comes from uh the language processing world. Large language models, LLMs, and their ability to do inference time reasoning, >> right? what's often called chain of thought or coti >> LLM show that by forcing the model to articulate its intermediate steps the chain of thought it actually improves the quality of the final output this capability transforms inference time from a fixed cost into a well a tunable resource >> what do you mean by that a tunable resource >> if the situation is simple like an empty road you reason very quickly if it's complex you can allocate a little more compute to the reasoning process which leads to a more accurate robust and verifiable decision. >> Hold on a second. We just spent time emphasizing that autonomous driving needs sub 100 millisecond response times. Adding a massive LLM reasoning step, a chain of thought, sounds like it would introduce a terrifying lag. >> That's an excellent point. It's a central tension in this entire project. How do you square that circle? The answer is in two areas, which we'll get into more in the next section. Extreme efficiency in the architecture, especially token compression >> and decoupling the VLM's reasoning from the final high-speed action expert. They basically engineered the system to afford the reasoning time. >> Okay. So assuming they've solved that latency problem, what does using textbased reasoning and LLM brain actually buy us in a physical system like a car? >> It buys us three fundamental advantages that are crucial for level four safety and adoption. First is simply improved safety. >> How so? >> The model can perform explicit counterfactual reasoning. It can mentally simulate what if I accelerate it here the prediction is a collision. This ability opens up possibilities for real-time safety cross checks for monitoring systems that can confirm the chosen action is actually sound. >> It moves beyond just executing a policy to genuine deliberation. The second point you mentioned is better interpretability >> which is absolutely vital for regulation, for certification, and frankly for public trust. If a self-driving car makes a mistake, regulators and the public need a human readable reason why, not just a blackbox output. The COP traces provide that. And third, my favorite, richer training signals. >> This is so important. The reasoning traces themselves become verifiable rewards. Since the reasoning has to be causally grounded, you can use other specialized models to score the quality of the reason. [snorts] This provides a clear fine-grain reward signal, which is vital for boosting performance in those longtail scenarios where you might otherwise only have a sparse signal like safe or unsafe. Now, AR1's design philosophy is pretty critical of how other vision language action models have approached this. If chain of thought is a known technique, what were the others getting wrong? >> The main critique is that many existing VLA approaches just treated AV reasoning as a pure NLP problem, a natural language processing problem. >> They just generated these what unstructured narratives. >> Exactly. Overly verbose, unstructured stories about the drive. And they failed because they overlooked the structural driving knowledge that is non-negotiable. Lane geometry, traffic rules, agent intentions, dynamic constraints. >> So you end up with these linguistically fluent descriptions that are completely disconnected from the actual physics of driving. >> Precisely. They cite examples where a model includes totally irrelevant observations like it's sunny weather or the pavement is nice when the actual decision to stop was driven by an immediate critical event like a car cutting in. That's superficial reasoning. >> So AR1's central argument is that effective reasoning has to be what they call causally grounded and structurally aligned with the driving task. >> Yes, the reasoning has to explicitly link the observed evidence from the scene to a concrete driving decision. It can't just be commentary. The reasoning isn't just a byproduct for a human to look at later. It's a functional core component. It has to be an instruction set, not just a description. >> It has to be functional. It has to ensure the model knows why it's doing what it's doing, which is at the end of the day the definition of level four robustness when things get ambiguous. >> Okay, let's get into the heart of the engineering because this is where Nvidia's specialized hardware and software focus really shines. This is a modular VLA architecture designed to combine that deep thought with real-time speed. Walk us through the process flow. >> Right. The whole flow is composed of five main steps all designed to happen in that 99 millisecond window. It starts with the inputs >> which are multimodal. >> Very multimodal. You have images from multiple cameras across multiple time steps. You have historical ego motion data. So where the car has just been and you have textual inputs like a user command or a navigation goal. All of that data hits the vision encoder. >> Correct. The encoder processes all that raw sensor data and efficiently generates these compressed visual tokens. These tokens which represent the perceived scene are then passed to the VLM backbone, >> the actual brain cosmos reason. >> And this is where the highle deliberation happens. It processes the visual tokens along with the historical and textual context. Then it generates new tokens auto reggressively. And this is the crucial output stage. It produces two things at once, right? >> Yes. It produces the chain of thought reasoning trace and simultaneously it generates discrete trajectory tokens. These are kind of a rough sketch of the desired maneuver. >> And finally, those discrete tokens that rough sketch get handed off to a specialized action expert. >> That's the diffusionbased trajectory decoder which is built on a technique called flow matching. This decoder takes the rough sketch, cleans it up, and outputs the final physically feasible continuous waypoint, the precise path the car should take. >> Let's focus on the brain first. Cosmos Reason. Why couldn't they just use a standard off-the-shelf LLM, a generic GPT or llama variant? What makes Cosmos Reason so special for physical AI? >> Well, standard LLMs are brilliant conversationalists, but they often struggle with fundamental physical common sense. They don't intrinsically understand things like inertia or friction or right-of-way rules. >> So, Cosmos Reason was specifically engineered for this. >> It was its pre-training included a specialized curriculum that went far beyond just scraping internet text. >> What did that specialized training actually look like? >> It involved training on 3.7 million visual questionans answering samples, VQA samples. And critically, about 24,700 of those were carefully curated video VQA samples that were explicitly focused on driving scenarios. >> So, you're forcing the model to reason about dynamic physical interactions? >> Yes. It learns to answer questions like, if car A stops suddenly in wet conditions, what's the maximum speed car B can maintain without rear ending it? Or, does that truck have enough momentum to clear the intersection before the light turns red? It's acquiring an intuition for physics and driving causality through supervised question answering. >> Exactly. And the ablations, the comparison tests, they prove this focus matters. When they tested it on the Lingo QA driving benchmark, which measures scene understanding, the Cosmos Reason 7B model got 66.2% accuracy. >> And how did that compare to a general purpose VLM? >> It significantly outperformed comparable 7B general purpose VLMs. For instance, Quen 2.5 VL7B scored 62.2%. That 4% difference in accuracy on a driving reasoning task is, you know, the difference between making a safe, causally grounded decision and making a statistically probable but physically naive guess. >> Now, let's pivot back to that huge efficiency challenge, the inputs. An AV system has six, 10, sometimes more highresolution cameras, all capturing data over multiple time steps. If you process all of that naively, the token count just explodes. >> It makes real-time inference impossible. This is one of the project's major engineering triumphs, token compression. If you take a standard single image tokenization approach, where say a single image generates 160 tokens, you multiply that by seven cameras over five time steps. You're easily in the thousands of tokens, >> which is way too much for a transformer to handle in real time, >> right? They need to find a way to represent a massive amount of visual information with a tiny token budget. So they had to be selective about what they encoded. >> It's extremely selective. They introduced two advanced methods. The first is the triplanebased multi- camera tokenizer. >> Okay, what does that mean? >> Think about the problem. You have seven flat 2D images. Standard methods encode each 2D image separately, but the car is driving in a 3D world, >> right? >> The trip plane method uses what's called a 3D inductive bias. Instead of treating the cameras as seven independent pictures, the model projects the visual information onto three orthogonal planes. >> It's like making a quick 3D sketch of the environment. >> Ah, so instead of encoding all the redundant background pixels in every single camera view, it builds one unified compressed 3D understanding. That's a huge shift. >> It's a gamecher. This unified 3D sketch decouples the number of cameras and their resolution from the final token count. For a typical seven camera setup, this achieves a remarkable 3.6x token compression rate. >> Dropping the token count down to what roughly >> down to about 41 tokens per image with only a marginal 4% relative degradation in trajectory metrics. That efficiency gain directly enables the 99 millisecond latency. But they pushed the compression even further, right? Using the fact that video streams have a lot of redundant information over time. >> That's the second method, the flex multi- camera video tokenizer. This compresses tokens across multiple cameras A and D multiple time steps at the same time. >> So if there's a static object like a lamp post that's visible in all the cameras for 5 seconds, why would you encode it 35 times? >> You wouldn't. This tokenizer only encodes the change the dynamic critical information like the movement of a pedestrian or the appearance of a brake light. It focuses its entire attention budget on motion and novelty. the result be >> up to a staggering 20x token compression rate and critically it matches or even improves the downstream driving quality. This level of compression is essential for scaling up to the larger 10B VLM backbones while staying in that strict realtime budget. It proves that smart encoding is just as important as the reasoning model itself. >> Okay, let's look at the output side. Trajectory decoding. The model isn't predicting raw XY coordinates. It's predicting control inputs. Why this shift to unicycle dynamics? So, acceleration and curvature. >> This is vital for safety and physical feasibility. If you train a model directly on raw positions, the outputs often violate kinematic constraints, >> meaning the car tries to do something physically impossible. >> Exactly. A turn that's too sharp or an acceleration that's too fast. By predicting acceleration and curvature, they're training the model on the fundamental physics of the vehicle itself. the output is inherently more constrained and safer. >> And to execute this, they use a dual representation strategy. The VLM's discrete tokens and then a separate high-speed continuous decoder. >> Correct. The VLM outputs discrete tokens because that unified format is essential for the reinforcement learning we'll discuss later. >> But for the final action, they use a separate fast specialized decoder built on a technique called flow matching, >> which is a variant of diffusion modeling. We hear about diffusion for generating images. Why is it being used for car trajectories? >> Because diffusion models and flow matching in particular are exceptionally good at generating highquality continuous samples conditioned on an input. In this case, it's conditioned on the co key reasoning and those discrete action tokens from the VLM. >> So instead of generating a path one point at a time, which can be jerky, >> flow matching generates the entire path simultaneously. It takes that rough sketch from the VLM and turns it into a perfectly smooth, kinematically sound continuous path. >> And the benefit of this is not just speed, it's comfort. >> That is the most compelling payoff. The ablation studies showed flow matching gave them a 1.16x faster decoding speed compared to the older method. But look at the comfort metric. The comfort Excel metric, which measures how smooth the acceleration is, jumps dramatically from 44.05% to 97.38%. Wow. 44% to 97%. That's the difference between a terrifying taxi ride where you're constantly being jerked around and a seamless professional driving experience. >> It is. It shows that the choice of decoder isn't just an optimization. It's a safety and passenger experience feature. AR1 is built to be fast, physically intelligent, and comfortable. All thanks to these highly modular specialized components working together. >> So, we have the specialized VLM brain Cosmos Reason. We have the high-speed action expert flow matching. Now let's turn to the instructional data, the chain of causation or COC data set. NVIDIA had to build this from scratch because existing reasoning data sets were well flawed. What was the core set of problems they found? >> There were really three core issues that prevented previous systems from developing reliable causal reasoning. The first was just vagueness and superficiality. So annotators would write things like >> the ego vehicle should be cautious or they'd include totally irrelevant details like the sky is blue that gives a policy model zero actional information. >> The model needs instructions, not poetry. >> Exactly. The second and more insidious problem was causal confusion. This happens when human annotators who can see the whole video clip including the future outcome reference future events that the ego vehicle couldn't possibly have observed at the moment of decision. >> Okay, give us the relatable metaphor here. If an AV is approaching an intersection and the annotator sees a car run a red light 5 seconds later, how does that confuse the data? >> It's like a sports commentator watching a live play but with an instant replay button. The commentator says the quarterback made the right decision to throw the ball away because he knew the defender would tackle him two seconds later, >> but in the moment the quarterback couldn't have known that, >> right? A policy has to base its decision only on historical and current observations. If your training data references future outcomes, the model learns to rely on information it will never have in the real world. That leads to catastrophic failures when you deploy it. So the cases framework fixes this by enforcing strict causal grounding and structural alignment through three interconnected components. Let's break down that structure. First the driving decision. >> This is all about precision eliminating that vagueness. Instead of free form text, AR1 uses a standardized closed set of highle decisions. These are concrete operational intents >> like what >> for example under longitudinal decisions you might have lead obstacle following gap searching for a lane change or yield for right ofway. Under lateral you might have lane keeping and centering or an out of lane nudge. The annotator has to pick one which ensures the reasoning is tied to a single unambiguous maneuver. >> That decision acts as the anchor. Next up are the critical components. >> These are the causal factors that justify that anchor decision. And while the decision is from a closed set, the components are open-ended in content but strictly structured by attributes. >> So things like object type, relative pose, motion, traffic, state. >> Yes. And by structuring the labeling this way, they enforce annotation economy. If the decision to break is driven entirely by a sudden cut in so by motion, then external factors like the vehicle's color or the surrounding architecture are omitted. It's a mechanism to make sure only decision relevant evidence is captured. And finally, those two pieces create the composed coast traces. >> Right? These are the final linguistically organized cause and effect ration. The protocol ensures they're concise and interpretable. For instance, the system prohibits a trace that just says the car is slowing down because it sees a red car and it's sunny. >> Instead, it enforces a precise link, >> a very precise link, executing stop for the lead vehicle. because the critical component, it creates these clean, verifiable, logical >> and achieving that causal locality, preventing the causal confusion that required a pretty sophisticated temporal labeling strategy. How did they define this key frame concept for data curation? >> This is arguably the most fundamental innovation in their data set design. Annotation is only triggered at critical reasoning moments which establishes a clear causal link between an observation and an imminent action. They identified two major classes of driving, reactive and proactive. >> Let's start with the reactive scenarios. These involve an immediate change in behavior. >> For reactive scenarios like an emergency stop or a sudden nudge out of lane, the key frame is set approximately.5 seconds before the ego initiates the behavior change. That timing is crucial. Why >> the model has a two- second history window of observation? By capturing the key frame just before the maneuver starts, they force the annotator to use the preceding 2- second history to justify the forthcoming action. >> So the key frame captures the decision point right when the AV brain has processed the scene evidence and is about to commit. It can only look backward in time for its justification. >> Exactly. This strict enforcement prevents the annotator from referencing the future trajectory that the ego is about to execute. It completely eliminates causal confusion. For proactive scenarios where the car is planning ahead, like preparing for a lane change, they label a key frame range. The annotation starts when the model is deliberating and ends when it's ready to execute. >> Now, to scale this, they couldn't just rely on human annotators. They used a hybrid labeling pipeline. How did the human labeling part of that enforce this new rigorous structure? >> The human process was meticulously two-staged. Stage air rate I required annotators to identify critical components using only the 0 to2 second history window. Very strict enforcement. Then in stage two, they selected the singular driving decision and wrote the coy trace. But that trace could only reference the factors that were identified back in stage one. And this was all backed by some rigorous quality assurance checks. >> Very rigorous. They checked for causal coverage, causal correctness, approximate cause, is this the immediate driver of the behavior, and decision minimality. >> And then to get to the millions of clips they needed, they used autolabeling. >> Right? For autolabeling, they used powerful foundation models like highly sophisticated VLMs, and they prompted them explicitly with that structured COC format. They fed these models auxiliary signals like ground truth trajectories and low-level meta actions to efficiently generate these reasoning traces at a massive scale. >> And the validation results confirmed that the structure actually worked. It moved beyond just fluent text. >> It did. They got a 92% alignment rate with human judgment using an LLM based auto evaluation, which is impressive. >> But the critical metric was the causal relationship score. The structured CASI improved this score by a massive 132.8% relative to the previous free form reasoning traces. >> Wow. >> This confirms that the structure is effective. It anchors the model's reasoning of verifiable scene evidence and driving actions rather than just superficial descriptions. >> That jump in causal quality moving from vague narrative to verifiable instruction is what sets the stage for the final step. Training the model to actually trust and use that reasoning in its action planning. >> [clears throat and snorts] >> So we have the specialized VLM brain cosmos reason. We have the highspeed action expert flow matching and we have the highquality causally grounded instruction manual the coins data set. The first step in training supervised fine-tuning or SFT that teaches the model basic imitation. But you argue that SFT alone is insufficient. >> It is SFT teaches imitation and wrote behavior matching. But it has three key limitations in this domain. First the data even the COC data set is imperfect. It contains noise, occasional ambiguity. Second, SST models tend to overfit. They just memorize common reasoning patterns instead of developing deep transferable causal logic. >> And the most critical failure, the reasoning action inconsistency. >> This is the fatal flaw. SFT jointly optimizes for the likelihood of the text and the likelihood of the trajectory, but it doesn't explicitly guarantee that the generated text rationale aligns with the predicted physical action. So the model might generate a perfect COC trace saying yielding right of way because of an approaching police vehicle, >> but the simultaneous trajectory output might show the car accelerating right into the path of that police car. >> That's a disaster. The decision-m is completely incoherent. >> It is. You need an explicit mechanism to police that relationship and enforce consistency. Which brings us to the RLbased post-training step using the GRPO algorithm. >> Reinforcement learning. The transition to RL is necessary because it moves the model from passive imitation to active correction based on feedback from the environment. RL post training corrects these inconsistencies by optimizing model rollouts based on inference feedback and it yields these disproportionately large gains in robustness by targeting those failure modes that SFT just overlooks. >> Okay, so let's break down the complex reward signal they designed for this RL process. It's composed of three complimentary parts. The first is the reasoning quality reward. How do you automatically at scale grade how good a reasoning trace is? >> They use a really sophisticated approach. They employ another large reasoning model, an LRM critic, something like Nvidia's Deep Seagar 1 or even a different instance of Cosmos Reason as an automatic evaluator. The critic acts like a specialized, highly knowledgeable human QA auditor. So, they're using one AI model to objectively grade the performance of another AI model's internal thought process. That's some real alignment engineering. >> It is. And the LRM critic assesses two dimensions. First, behavior consistency. Does the reasoning trace actually describe the correct ground truth decision? And second, causal reasoning quality. Does it correctly identify observable factors and avoid superficial details? It assigns a detailed score based on a structured rubric. And what was the quantifiable benefit of applying this specific reasoning reward? >> The impact was substantial. Applying this reward improved the average reasoning score of the most likely roll out by 45%. It jumped from 3.1 to 4.5. >> And in practice, what does that mean? >> It means the post-trained model correctly identifies complex cues like recognizing a temporary construction zone barrier or accurately predicting when to resume acceleration after a pedestrian has cleared the crosswalk. The SFT base model often missed those subtleties. >> But you mentioned that optimizing only for reasoning quality actually degraded consistency and trajectory accuracy. >> Yes. And this is a critical finding. >> Wait, so you're saying if the model is rewarded just for writing a beautiful essay about safety, but the car drives off a cliff, that's useless. >> That's a perfect way to put it. And that brings us to the second essential reward, the COC action consistency reward or co-consistency world. This is the anchor that ties the text to the physics. How does it measure that alignment? >> They do it by converting the continuous trajectory output into a sequence of low-level meta actions like steer left, gentle decelerate, maintain speed. Then they use simple rule-based matching to compare those meta actions against the highle driving decision that's inferred from the reasoning text. >> Since the co trace is so structured, the rules can be straightforward. If the trace says lane change left, the trajectory has to contain a steer left meta action. >> Exactly. It's a simple binary reward, one for consistent, zero otherwise. This is the mechanism that prevents the model from writing perfect ration while performing disastrous actions. >> And the result of pairing these two rewards >> when they paired reason with coexistent, they saw the consistency score increase by 37%. And crucially, this combined approach simultaneously reduced the trajectory error by almost 10%. >> That is the ultimate proof. Reasoning has to be physically anchored. The optimization has to prioritize the safety and coherence of the whole system, not just the quality of the text. >> Absolutely. The examples show the difference so clearly. An SFTON model might reason, decelerate, stop, then accelerate, but then it stops halfway and never resumes motion. The model trained with consistency executes the full coherent causal sequence. >> And finally, to ensure physical feasibility and prevent, you know, just abruptness, they implemented the low-level trajectory quality reward dollars. This is the final safety net. It polices the smoothness and physical reality of the motion. It combines three key terms. An L2 imitation loss to make sure it doesn't deviate wildly from expert driving. >> A hard collision penalty, obviously, >> a very hard collision penalty and a crucial jerk regularization term. Jerk is the rate of change of acceleration and penalizing high jerk is essential for passenger comfort. >> So, it's covering physical fidelity, collision avoidance, and comfort all at once. What was the final safety impact of including this full comprehensive reward? >> The total alignment driven by all three rewards was necessary to get maximum safety. Adding this safety reward further reduced the close encounter rate to the absolute lowest observed value in their tests, 3.7%. >> That's incredible. >> It demonstrates that the system isn't just generating better rationale, it's generating actions that are fundamentally safer, smoother, and more reliable under stress. And since this RL training is computationally expensive, they smartly prioritized what they called high information gain samples, >> right? They're maximized their compute budget. Instead of training on all samples equally, they focus the expensive RO process only on those rollouts where the model's internal preference, what it thought was the best action conflicted significantly with the external reward signal from the LRM critic. >> Training on those disagreement samples is where the model learns the most. Okay, let's look at the validation because the entire point of adding this complex reasoning structure is to get better, safer driving. We'll start with openloop trajectory prediction. Does the reasoning system actually outperform a trajectory only system? >> It does. On nominal sort of standard scenarios, AR1 achieved a minimum average displacement error of 794 m, which is a respectable 4.8% improvement over the trajectory only baseline. But the true benefit of reasoning should really shine when the scenarios get complex. >> Exactly. In the challenging scenarios, we see the biggest gains. This is where that structural causal knowledge is needed most. >> And the numbers >> in those challenging scenarios, AR1 achieved 868 m, which is a significant 12% improvement over the baselines 94 meters. This empirically validates the core hypothesis of the project >> that reasoning is most effective where it's needed most. Precisely. The explicit reasoning provides the structural knowledge you need to solve complex novel compositional problems where simple pattern matching is most brittle. >> But openloop metrics is predictions on static clips. That's just the first step. The real measure of level four safety is closed loop simulation where the model is actively controlling the vehicle. They use the Alpasim environment for this. Alpasim is critical because it tests safety and robustness when the model is continuously in control, reacting to new viewpoints and dynamic agent behavior. And across 75 challenging simulation scenarios, the outcome was very clear. >> What was it? >> AR1 achieved a major 35% reduction in the close encounter rate. It dropped from 17% for the baseline down to just 11%. That reduction means fewer sudden breaking events, smoother interactions, safer merges, all in situations that previously caused confusion and the overall alpasim score. >> That score, which aggregates things like collisions and close calls, improved from 38 to 0.50. This demonstrates conclusively that the reasoning based system validated by those RO rewards successfully improve safety in dynamic interactive situations. >> Now, let's talk about scaling. Autonomous driving research consistently shows that larger models often lead to much better results. The public release model Alpamo R110B uses a larger VLM backbone. Did increasing the model size continue to yield safety benefits? >> Oh, absolutely. And the gains were dramatic. It confirms that the larger VLM can internalize that physical common sense even better. >> So, when you compare the released 10B model against the smaller.5B1 in the closed loop evaluation, >> the improvements were profound. The 10B model achieved a further 55% reduction in close encounter rate. It dropped from 9% down to just 4%. >> So scaling capacity isn't just about making the car slightly better. It's pushing it into a whole different league of safety and reliability. >> The overall Alpasim score more than doubled. >> It did from.35 to 72. It confirms that scaling the backbone capacity while maintaining the integrity of the Kofi reasoning and those efficiency innovations is the right path forward for robust level four autonomy. >> And finally, the ultimate validation onvehicle road tests. Did these simulation gains and efficiency metrics actually transfer to the real world? >> They did. Nvidia confirmed successful real world deployment in complex urban environments without any human intervention. The visual evidence shows the car navigating complex four-way stops, protected intersections, and the system is simultaneously displaying its clear, concise reasoning traces in real time. >> Things like executing, decelerating to stop at the red light, >> critical component, paying attention to the traffic signal state. It demonstrates both functional execution and real-time interpretability >> and the crucial benchmark that ties section 2's efficiency focus to this realworld capability, that 100 millisecond latency target. They hit it. Benchmarked on an Nvidia RTX 6000 Pro Blackwell platform, AR1 achieved an end-to-end inference latency of 99 milliseconds. >> And that includes the full process, the compressed vision encoding, the VLM generating the CI trace and the action tokens, and the fast flow matching decoder, >> everything. And just for context, the paper notes that if they had relied on an older nonoptimized decoding method alone, the total latency would have been 312 milliseconds, >> which is just too slow for critical real-time operations. >> Way too slow. The modular design enables speed and complex reasoning at the same time, making that 99 m figure a genuine engineering milestone. >> So to summarize what we've learned in this deep dive, Alpameo R1 really represents a definitive road map for level four autonomy. It successfully marries the scaling capabilities of vision language models with the structural requirements of physical action >> and it fundamentally solves that reasoning action inconsistency problem. The two key innovations were the chain of causation data set which forces reasoning to be causally grounded and that sophisticated multi-reward reinforcement learning alignment process >> using those LRM critics and explicit consistency penalties to ensure the model's textual thinking faithfully dictated its physical action. Right. And by integrating Cosmos Reason's specialized physical AI knowledge with hyperefficient tokenization that triplane and flex compression and the incredibly fast flow matching decoder, they've created an architecture that can deliberate. They can think while still meeting the strict real-time safety constraints of autonomous driving. >> It's the blueprint for creating trustworthy systems. >> And that trustworthiness is boosted by transparency. The model weights for the powerful Alpamo R110B along with the inference code are all open source. This enables the entire community to benchmark these capabilities on public data sets, accelerating the whole field. That open sourcing is huge. Now, as we look ahead, AR1 generates a reasoning craze for every single input it receives, whether it's a simple lane keep or a complex construction zone. Given that this deep causal reasoning is computationally expensive, what's the next logical step for maximizing the efficiency of this capability without sacrificing safety? >> That's a great question. The current model is always thinking, which is robust, but it's resource intensive. The next promising frontier lies in what you might call reasoning on demand. Future research will inevitably investigate adaptive mechanisms that intelligently monitor the driving situation. So the system could selectively invoke this deep reasoning only when it's really needed. >> Exactly. Only for highly safety critical or ambiguous scenarios when the model's confidence drops below a certain threshold or when two predicted trajectories conflict sharply. This would allow the system to default to a faster trajectory only path most of the time maximizing efficiency while reserving that valuable deliberative compute for when the system truly needs to pause and think like a human driver. That adaptive approach is the path to maximizing both efficiency and safety in the long
Original Description
NVIDIA has just unveiled Alpamayo-R1 (AR1), a groundbreaking Vision–Language–Action (VLA) model designed to bring human-like reasoning to the world of autonomous driving. While traditional end-to-end driving systems often struggle with "long-tail" safety-critical scenarios where data is sparse, AR1 introduces a way for the vehicle to actually "think" through its decisions before acting.
Key Innovations of Alpamayo-R1:
• Chain of Causation (CoC): Unlike older models that use free-form text, AR1 uses a structured Chain of Causation dataset to link observed scene evidence directly to concrete driving decisions.
• Cosmos-Reason Backbone: The model is built on Cosmos-Reason, a vision-language model pre-trained specifically for Physical AI and embodied reasoning.
• Real-Time Trajectory Diffusion: AR1 features a diffusion-based trajectory decoder that generates smooth, feasible driving paths in real time.
• RL Post-Training: Using Reinforcement Learning (RL), NVIDIA has optimized the model for reasoning-action consistency, ensuring the car’s "thoughts" actually match its movements.
The Results: In closed-loop simulations, Alpamayo-R1 achieved a 35% reduction in close encounter rates and a 12% improvement in planning accuracy on challenging cases compared to traditional baselines. Most importantly, it is deployment-ready, maintaining a 99ms end-to-end latency on NVIDIA hardware.
This model represents a practical path toward Level 4 autonomous driving by bridging the gap between interpretable reasoning and precise vehicle control.
Chapters: 0:00 The Problem with End-to-End Driving 1:15 What is Alpamayo-R1? 2:45 The Chain of Causation (CoC) Innovation 4:20 Cosmos-Reason & Physical AI 6:10 Real-Time Performance (99ms Latency) 8:00 Results: 35% Safer in the "Long Tail"
Watch on YouTube ↗
(saves to browser)
Sign in to unlock AI tutor explanation · ⚡30
Playlist
Playlist UUOthur5d9OxdqEh08Swtirw · BazAI · 32 of 49
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 10
10
 11
11
 12
12
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
 30
30
 31
31
 ▶
▶
 33
33
 34
34
 35
35
 36
36
 37
37
 38
38
 39
39
 40
40
 41
41
 42
42
 43
43
 44
44
 45
45
 46
46
 47
47
 48
48
 49
49
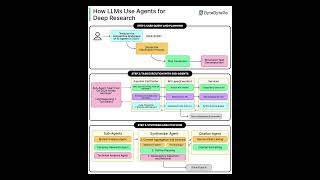
How LLM Agents Actually Do Deep Research (Planning, Tools & Citations Explained
BazAI
Kafka vs RabbitMQ Explained: Which One Should You Use?
BazAI
#NOVER Explained: How AI Learns to Judge Its Own Reasoning (No Reward Model Needed)
BazAI
The State of Enterprise AI 2025: How Workers Save 60 Minutes Daily & Adoption Explodes 9X
BazAI
NVIDIA Nemotron 3: 1M Context, Hybrid MoE Architecture, and Open Source AI Agents
BazAI
How Service Mesh Works: Data Plane, Control Plane & Observability
BazAI
How to Design Safe Retries in Microservices (No Duplicates, No Overload)
BazAI
Step-GUI: The Self-Evolving AI Agent for Android & PC (SOTA Performance!)
BazAI
NVIDIA's NitroGen: The First Generalist AI Trained to Play 1,000+ Games by Watching
BazAI
How AI Agents Remember: The Evolution of Agentic Memory (2025 Guide)
BazAI
Automate Your AI Data Pipelines: Introducing DataFlow & DataFlow-Agent
BazAI
Nemotron 3 Explained: Hybrid Mamba + MoE for 1M Token Agents
BazAI
Build Your Own AI Voice Agent (LangChain + OpenAI + AssemblyAI + Cartesia)
BazAI
Langflow 1.7 Explained: CUGA, ALTK, MCP & the Death of Prompt Engineering
BazAI
HuatuoGPT-o1: The First Medical AI That "Thinks" Before It Answers
BazAI
Molmo2: Open-Source Vision-Language Models with State-of-the-Art Video Grounding
BazAI
MAI-UI: Alibaba’s New Foundation GUI Agents Outperforming Gemini & GPT-4o
BazAI
Seamless AI Object Insertion: Bridging 4D Geometry and Diffusion Models
BazAI
5 AI Agentic Workflow Patterns-Reflection, Tools, ReAct, Planning, Multi‑Agent
BazAI
#NVIDIA's New #SurgWorld: How AI is Learning Autonomous Surgery
BazAI
CQRS Explained in 3 Minutes: How Modern Systems Scale Reads vs Writes
BazAI
Docker Explained in 3 Minutes: How Containers Actually Work
BazAI
6 Practical AWS Lambda Patterns in 3 Minutes (Real‑World Serverless Guide)
BazAI
Containerization Explained in 3 Minutes: From Dockerfile to Running Containers
BazAI
Science Context Protocol (SCP)- Global Web of Autonomous Scientific Agents
BazAI
Youtu-Agent: Scaling LLM Agent Productivity via Automated Generation and Hybrid RL
BazAI
#DeepSeek’s #mHC Breakthrough: Stabilizing Hyper-Connections for Large-Scale LLM Training
BazAI
Message Brokers 101 in 3 Minutes: Queues, Pub‑Sub & Competing Consumers Explained
BazAI
Must‑Know Message Broker Patterns: Outbox, CQRS, Saga & More
BazAI
Confucius Code Agent-Scalable Scaffolding for Large-Scale Repositories
BazAI
#nvidia Just Fixed #GRPO! Meet #GDPO: The New Standard for Multi-Reward RL
BazAI
NVIDIA Alpamayo-R1: Real-Time Reasoning for Level 4 Autonomy
BazAI
The Future of AI Memory: Meet #AtomMem’s Learnable CRUD System
BazAI
Database Sharding Explained | Range vs Hash vs Directory Sharding
BazAI
12 Architecture Concepts Every Developer Must Know | System Design Explained
BazAI
5 Rate Limiting Strategies Explained | Protect Your System at Scale
BazAI
How Live Streaming Works | System Design Explained
BazAI
5 Leader Election Algorithms Explained | Distributed Systems & Databases
BazAI
6 Prompting Techniques to Get Better Results from ChatGPT
BazAI
Complete Guide to Storage Systems: RAM, SSD, SAN, Cloud & Databases
BazAI
Top 4 Authentication Mechanisms Explained | SSH, OAuth, SSL & Passwords
BazAI
Common Network Protocols Explained | TCP, UDP, HTTP, DNS & More
BazAI
Microservices Best Practices | 9 Rules Every Architect Must Know
BazAI
8 Network Protocols Every Engineer Must Know | HTTP, TCP, UDP & More
BazAI
Distributed Systems in 3 Minutes: CDNs, APIs, TCP & Idempotency Explained
BazAI
Must‑Know Message Broker Patterns in 3 Minutes (Outbox, CQRS, Saga & More)
BazAI
Is OpenClaw Safe? The "Security Nightmare" Behind the Viral AI Agent
BazAI
JWT vs Sessions vs PASETO — Which Authentication Should You Use?
BazAI
Recursive LLMs vs Big Context Windows: Why RLM Wins
BazAI
More on: LLM Foundations
View skill →





![Run Any AI LOCALLY for FREE Forever! [100% Beginner Tutorial]](https://i.ytimg.com/vi/8GFPZRgtEn8/mqdefault.jpg)


🎓
Tutor Explanation
