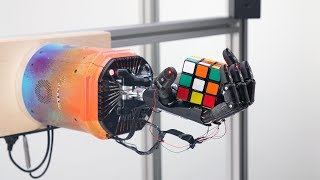
Solving Rubik’s Cube with a Robot Hand
Skills:
ML Maths Basics60%
Key Takeaways
OpenAI trained a pair of neural networks to solve the Rubik's Cube with a human-like robot hand using simulated environments and reinforcement learning, demonstrating the ability to generalize to new environments.
Full Transcript
we tried to build robots that learn a little bit like humans do by trial and error what we've done is trained an algorithm to solve the Rubik's Cube one-handed with a robotic captain which is actually pretty hard even for a human to do we don't tell it how the hand is to move the the cube in order to get there the particular friction that's on the fingers how easy it is to turn the faces on the cube what the gravity what the weight of the cube is all of these things it needs to learn by itself the interesting thing is that kind of standard techniques in robotics haven't been able to scale to that complexity that we see in a robotic hand humans have evolved to be able to manipulate and operate our hands so there's a huge amount of learning that's happened through evolution to get us to this point as a as a species and the robot has to learn all of this from scratch instead of trying to write very dedicated algorithms to operate such a hand we took a different approach where we create thousands of different simulated environments and learn to do the task in all of those and hopefully the robotic hand will be able to do it in the real world as well this means like thousands of years of experience that is your network has had in simulation every time the argument good at the task we make the task harder that's really crucial because you need exposure to really complicate environments in order to eventually be robust to the real world you put a rubber glove on their hand and can still carry out the task this ability to generalize to new environments feels like a very poor piece of intelligence it really changes the way we think about training of general purpose robots moving from thinking too much about the actual arguments and start thinking about how do we create complex enough worlds where they can learn at some point then it would be more down to the imagination what robots could actually accomplish they hope is to build robots that can do many different tasks to increase the standard of living and give everybody a better life [Music]
Original Description
We’ve trained a pair of neural networks to solve the Rubik’s Cube with a human-like robot hand.
Learn more: https://openai.com/blog/solving-rubiks-cube
Watch on YouTube ↗
(saves to browser)
Sign in to unlock AI tutor explanation · ⚡30
Playlist
Uploads from OpenAI · OpenAI · 33 of 60
1
 2
2
 3
3
 4
4
 5
5
 6
6
 7
7
 8
8
 9
9
 10
10
 11
11
 12
12
 13
13
 14
14
 15
15
 16
16
 17
17
 18
18
 19
19
 20
20
 21
21
 22
22
 23
23
 24
24
 25
25
 26
26
 27
27
 28
28
 29
29
 30
30
 31
31
 32
32
 ▶
▶
 34
34
 35
35
 36
36
 37
37
 38
38
 39
39
 40
40
 41
41
 42
42
 43
43
 44
44
 45
45
 46
46
 47
47
 48
48
 49
49
 50
50
 51
51
 52
52
 53
53
 54
54
 55
55
 56
56
 57
57
 58
58
 59
59
 60
60

Robots that Learn
OpenAI
Emergence of Grounded Compositional Language in Multi-Agent Populations
OpenAI
OpenAI + Dota 2
OpenAI
Dendi vs. OpenAI at The International 2017
OpenAI
Competitive Self-Play
OpenAI
Learning a Hierarchy
OpenAI
Physical Spam Detection
OpenAI
Ingredients for Robotics Research
OpenAI
OpenAI Five
OpenAI
OpenAI Five: Dota Gameplay
OpenAI
Learning Dexterity
OpenAI
Learning Dexterity: Uncut
OpenAI
OpenAI Five Benchmark: Post-Game Analysis
OpenAI
Investigating Model Based RL for Continuous Control | Alex Botev | 2018 Summer Intern Open House
OpenAI
Generative Modelling | Sadhika Malladi | 2018 Summer Intern Open House
OpenAI
A pathway to more efficient generative models | Will Grathwohl | 2018 Summer Intern Open House
OpenAI
Learning Dexterity | Alex Ray | 2018 Summer Intern Open House
OpenAI
Robust Vision-Based State Estimation | Hsiao-Yu 'Fish' Tung | 2018 Summer Intern Open House
OpenAI
Using Semantic Trees In Place of Sentences | Munashe Shumba | OpenAI Scholars Demo Day 2018
OpenAI
Reinforcement Learning with Prediction-Based Rewards
OpenAI
OpenAI Spinning Up in Deep RL Workshop
OpenAI
Arena Announcement and Closing | OpenAI Five Finals (6/6)
OpenAI
Co-Op Match | OpenAI Five Finals (5/6)
OpenAI
OpenAI Five vs. OG, Game 2 | OpenAI Five Finals (4/6)
OpenAI
OpenAI Five vs. OG, Game 1 | OpenAI Five Finals (3/6)
OpenAI
Pre-Match Panel Discussion | OpenAI Five Finals (2/6)
OpenAI
Opening Keynote | OpenAI Five Finals (1/6)
OpenAI
OpenAI Robotics Symposium 2019
OpenAI
OpenAI Scholars Demo Day 2019
OpenAI
Multi-Agent Hide and Seek
OpenAI
Solving Rubik’s Cube with a Robot Hand: Uncut
OpenAI
Solving Rubik’s Cube with a Robot Hand: Perturbations
OpenAI
Solving Rubik’s Cube with a Robot Hand
OpenAI
Music Generation | Christine Payne | OpenAI Scholars Demo Day 2018
OpenAI
Deephypebot | Nadja Rhodes | OpenAI Scholars Demo Day 2018
OpenAI
Physics Net | Ifu Aniemeka | OpenAI Scholars Demo Day 2018
OpenAI
Art Composition Attributes + CycleGAN | Holly Grimm | OpenAI Scholars Demo Day 2018
OpenAI
Generating Emotional Landscapes | Hannah Davis | OpenAI Scholars Demo Day 2018
OpenAI
Looking For Grammar In All The Right Places | Alethea Power | OpenAI Scholars Demo Day 2020
OpenAI
Semantic Parsing English to GraphQL | Andre Carerra | OpenAI Scholars Demo Day 2020
OpenAI
Long term credit assignment with temporal reward transp… | Cathy Yeh | OpenAI Scholars Demo Day 2020
OpenAI
Social learning in independent multi-agent reinfor… | Kamal N’dousse | OpenAI Scholars Demo Day 2020
OpenAI
Quantifying Interpretability of Models Trained on Coi… | Jorge Orbay | OpenAI Scholars Demo Day 2020
OpenAI
Towards Epileptic Seizure Prediction with Deep Network | Kata Slama | OpenAI Scholars Demo Day 2020
OpenAI
Universal Adversarial Perturbations and Language M… | Pamela Mishkin | OpenAI Scholars Demo Day 2020
OpenAI
Introductions by Sam Altman & Greg Brockman | OpenAI Scholars Demo Day 2020
OpenAI
Introduction by Sam Altman | OpenAI Scholars Demo Day 2021
OpenAI
Breaking Contrastive Models with the SET Card Game | Legg Yeung | OpenAI Scholars Demo Day 2021
OpenAI
Large Scale Reward Modeling | Jonathan Ward | OpenAI Scholars Demo Day 2021
OpenAI
Words to Bytes: Exploring Language Tokenizations | Sam Gbafa | OpenAI Scholars Demo Day 2021
OpenAI
Learning Multiple Modes of Behavior in a Continuous… | Tyna Eloundou | OpenAI Scholars Demo Day 2021
OpenAI
Scaling Laws for Language Transfer Learning | Christina Kim | OpenAI Scholars Demo Day 2021
OpenAI
Contrastive Language Encoding | Ellie Kitanidis | OpenAI Scholars Demo Day 2021
OpenAI
Characterizing Test Time Compute on Graph Structur… | Kudzo Ahegbebu | OpenAI Scholars Demo Day 2021
OpenAI
Studying Scaling Laws for Transformer Architecture … | Shola Oyedele | OpenAI Scholars Demo Day 2021
OpenAI
Feedback Loops in Opinion Modeling | Danielle Ensign | OpenAI Scholars Demo Day 2021
OpenAI
Creating a Space Game with OpenAI Codex
OpenAI
“Hello World” with OpenAI Codex
OpenAI
Talking to Your Computer with OpenAI Codex
OpenAI
Data Science with OpenAI Codex
OpenAI
More on: ML Maths Basics
View skill →







Related Reads
📰
📰
📰
📰
Automatic Relevance Determination Regression for Time Series Forecasting
Medium · Data Science
Deploying Multi-Turn RL Infrastructure for Amazon Nova on Amazon SageMaker HyperPod
AWS Machine Learning
Python for Data Science — Sampling and Why Your Conclusions Can Be Wrong
Medium · Machine Learning
From a Student Project to an ICML Spotlight
Medium · Machine Learning
🎓
Tutor Explanation
