Robotic Path Planning and Task Execution
Key Takeaways
Covers robotic path planning and task execution using algorithms like Breadth-First Search and A*
Original Description
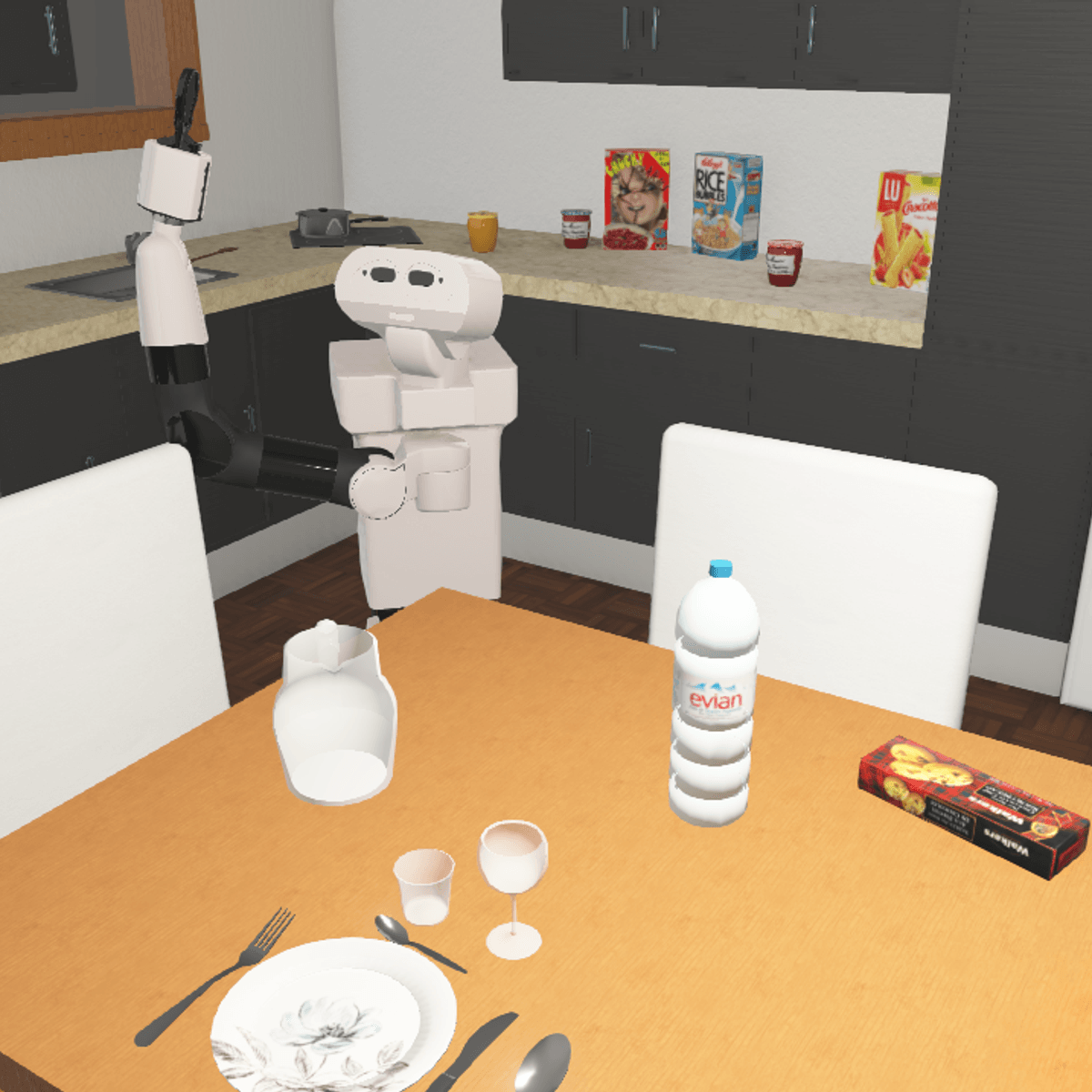
This course, which is the last and final course in the Introduction to Robotics with Webots specialization, will teach you basic approaches for planning robot trajectories and sequence their task execution. In "Robotic Path Planning and Task Execution", you will develop standard algorithms such as Breadth-First Search, Dijkstra's, A* and Rapidly Exploring Random Trees through guided exercises. You will implement Behavior Trees for task sequencing and experiment with a mobile manipulation robot "Tiago Steel".
It is recommended that you complete the first and second courses of this specialization, “Introduction to Robotics: Basic Behaviors” and "Robotic Mapping and Trajectory Generation" , before beginning this one.
This course can be taken for academic credit as part of CU Boulder’s MS in Computer Science degrees offered on the Coursera platform. These fully accredited graduate degrees offer targeted courses, short 8-week sessions, and pay-as-you-go tuition. Admission is based on performance in three preliminary courses, not academic history. CU degrees on Coursera are ideal for recent graduates or working professionals. Learn more:
MS in Computer Science: https://coursera.org/degrees/ms-computer-science-boulder
Watch on External: Coursera ↗
(saves to browser)
Sign in to unlock AI tutor explanation · ⚡30
More on: Algorithm Basics
View skill →







Related AI Lessons
⚡
⚡
⚡
⚡
Bloom Filters, Explained Properly
Dev.to · Daksh Gargas
Prefix Sums: The Preprocessing Trick That Makes Range Queries Instant
Medium · Programming
I Thought I Was Ready for the Interview — Then One Simple Math Question Destroyed Me
Medium · Programming
Week 2(Day 10): LeetCode Two Pointers(slow & fast): Remove Duplicates from Sorted Array (Brute…
Medium · Python
🎓
Tutor Explanation
