Robotic Mapping and Trajectory Generation
Key Takeaways
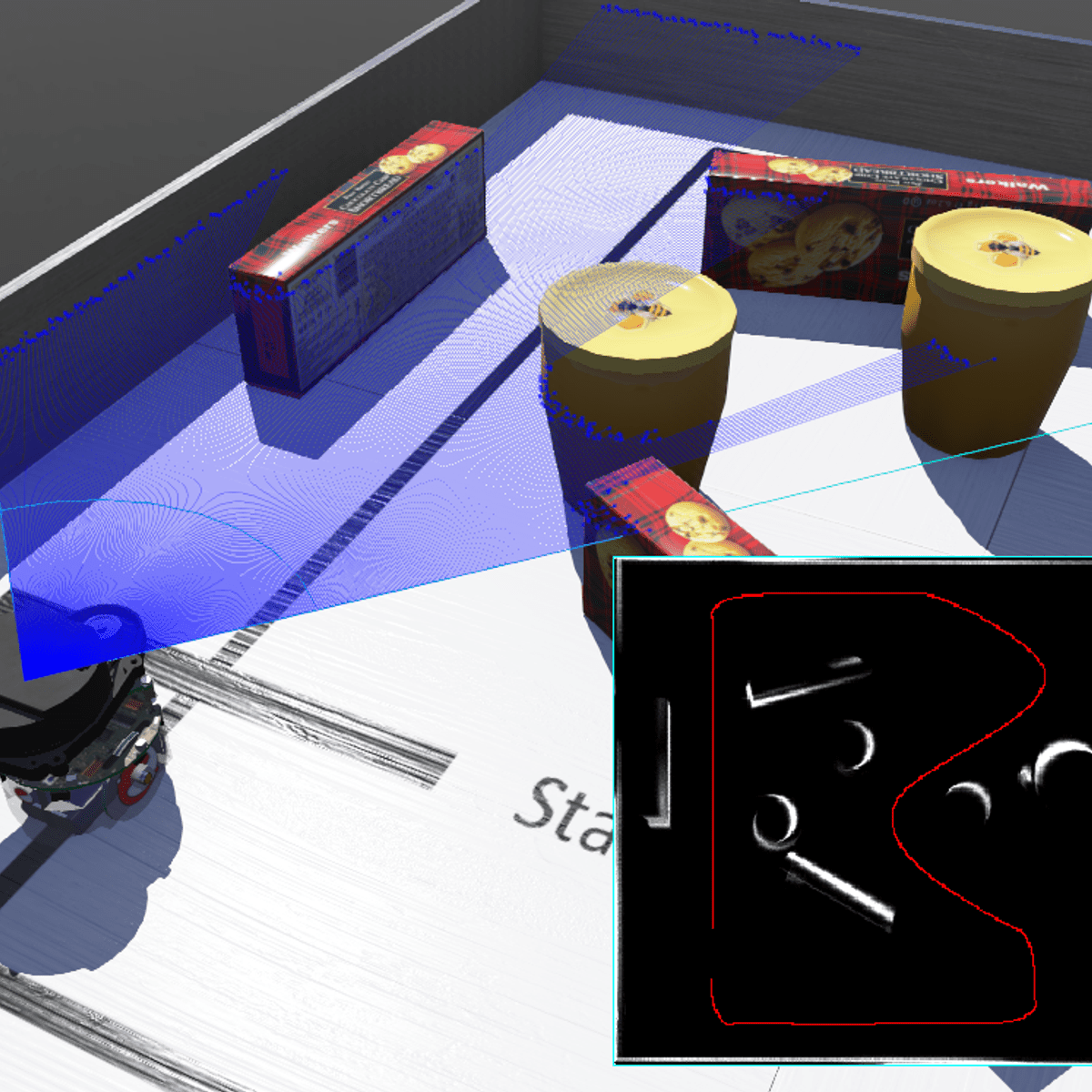
Performing robotic mapping and trajectory generation using feedback control approach
Original Description
In this second course of the Introduction to Robotics specialization, "Robotic Mapping and Trajectory Generation", you will learn how to perform basic inverse kinematics of (non-)holonomic systems using a feedback control approach. You will also learn how to process multi-dimensional sensor signals such as laser range scanners for mapping. Additionally, you will apply the overarching focus of mechanisms and sensors as sources of uncertainty and gain techniques to how to model and control them.
It is recommended that you complete the first course of this specialization, “Introduction to Robotics: Basic Behaviors”, before beginning this one.
This course can be taken for academic credit as part of CU Boulder’s MS in Computer Science degrees offered on the Coursera platform. These fully accredited graduate degrees offer targeted courses, short 8-week sessions, and pay-as-you-go tuition. Admission is based on performance in three preliminary courses, not academic history. CU degrees on Coursera are ideal for recent graduates or working professionals. Learn more:
MS in Computer Science: https://coursera.org/degrees/ms-computer-science-boulder
Watch on External: Coursera ↗
(saves to browser)
Sign in to unlock AI tutor explanation · ⚡30
Related Reads
📰
📰
📰
📰
Port Numbers, In Order: Why the List Has Gaps, and the Best Stories Behind the Numbers
Dev.to · Yuuki Yamashita
Day 97 of Learning MERN Stack
Dev.to · Ali Hamza
Unix Timestamp Cheat Sheet: Convert, Read, and Debug Like a Pro
Dev.to · kingfujing
Practice Backend Incident Interviews With a 70-Line Node.js Drill
Dev.to · Karuha
🎓
Tutor Explanation
