Basic Robotic Behaviors and Odometry
Key Takeaways
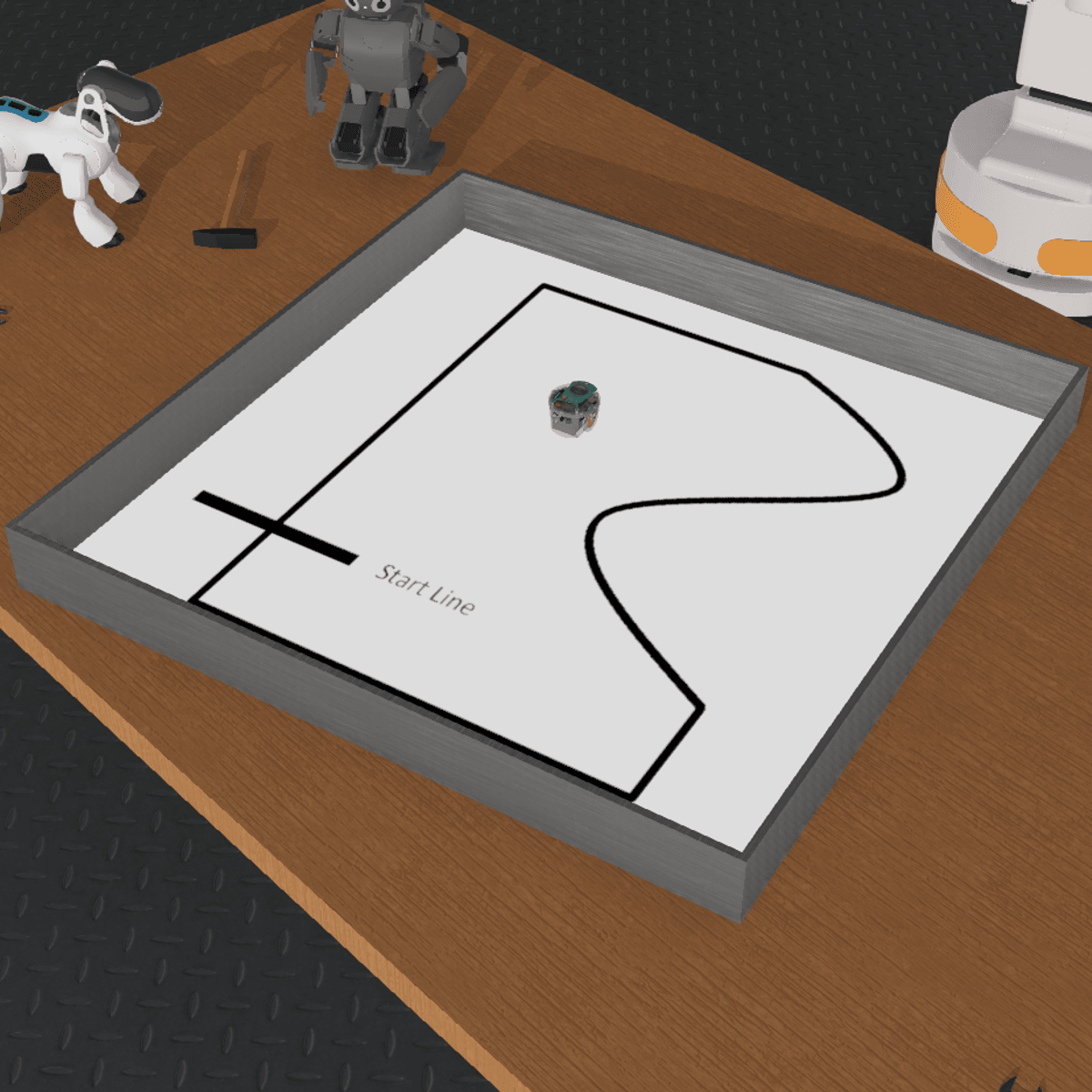
Introduces basic robotic behaviors and odometry using Webots for autonomous mobile robots
Original Description
"Basic Robotic Behaviors and Odometry" provides you with an introduction to autonomous mobile robots, including forward kinematics (“odometry”), basic sensors and actuators, and simple reactive behavior. This course is centered around exercises in the realistic, physics-based simulator, “Webots”, where you will experiment in a hands-on manner with simple reactive behaviors for collision avoidance and line following, state machines, and basic forward kinematics of non-holonomic systems. An overarching objective of this course is to understand the role of the physical system on algorithm design and its role as source of uncertainty that makes robots non-deterministic. If you are interested in getting started with robotics, this course is for you!
This course can be taken for academic credit as part of CU Boulder’s MS in Computer Science degrees offered on the Coursera platform. These fully accredited graduate degrees offer targeted courses, short 8-week sessions, and pay-as-you-go tuition. Admission is based on performance in three preliminary courses, not academic history. CU degrees on Coursera are ideal for recent graduates or working professionals. Learn more:
MS in Computer Science: https://coursera.org/degrees/ms-computer-science-boulder
Watch on External: Coursera ↗
(saves to browser)
Sign in to unlock AI tutor explanation · ⚡30
Related Reads
📰
📰
📰
📰
Every service your bot offers becomes a callable handle on the BizNode network. Other bots discover and invoke your handles...
Dev.to AI
The Real AI Bottleneck Isn't Tech — It's Management (And How to Fix It in Your Browser)
Dev.to AI
AI Scaling Secrets
Dev.to AI
The Rise of Agentic AI: Understanding AI Agents, Their Impact, and How to Build Them
Dev.to AI
🎓
Tutor Explanation
